A Comparison Between Homography and Direct Linear Transforms Algorithms for Unmanned Aerial Vehicle Automatic Landing
doi: 10.14456/mijet.2023.19
Keywords:
UAV, Homography, DLTAbstract
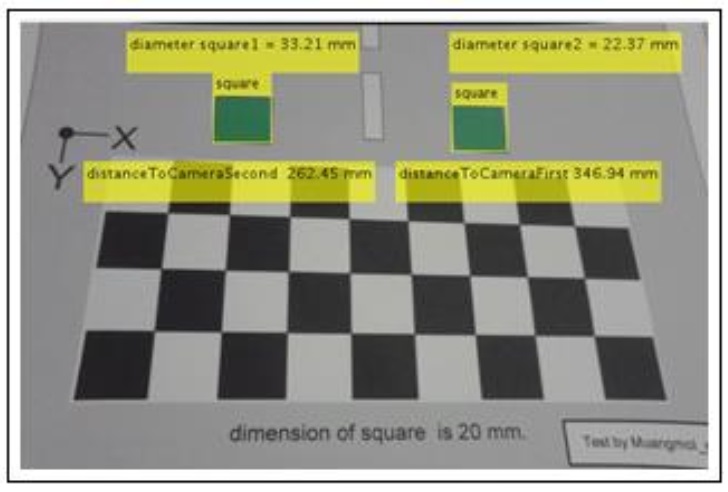
The purposes of this research were to compare between homography and direct linear transformation (DLT) algorithms for estimating the distance between unmanned aerial vehicle and the markers on runway while automatic landing and to compare the accuracy of the actual distance. The experriment have two trials, First, the square was designed with a yellow square as 20 mm. take a picture with the distance between the center of the camera to the center of the a yellow square mark as 400 mm. and testing with homography and DLT algorithms, The homography algorithm detected is 20.38 mm. 1.9% error, DLT algorithm detected is 16.47 mm. 17.65% error. The result of finding the distance between the center of the camera to the center of the yellow square, homography detected algorithm 401.99 mm. 0.49% error and the DLT algorithm detected 687.2 mm. 71.82% error. Second, the square was designed with two green squares as 20 mm. and take a picture with the distance between the center of the camera to the center of the two green squares mark as 300 mm. Testing homography and DLT algorithms, The homography algorithm at marker detected is 21.27 mm. 6.35% error, at second marker detected is 21.93 mm. 9.65% error, DLT algorithm at first marker detected is 9.52 mm. 52.44% error, at second marker detected is 12.47 mm. 37.65% error. The result of finding the distance between the center of the camera to the center of the green square, homography algorithm first marker detected 311.02 mm. 3.6733% error, at second marker detected 296.57 mm. 1.1433% error and DLT algorithm at first marker detected 112.89 mm. 62.37% error, at second marker detected 125.74 mm. 58.066% error. In conclusion, a square yellow designed with homograph algorithm is more accurate than DLT algorithms.
References
M. Senpheng, “Detection of markers on runway for distance of automatic landing using computer vision,” 9th ECTI-CARD, Chiang khan, Thailand, 2017.
M. Senpheng, “Detection of markers on runway and conversion to 3D information for automatic landing using computer vision,” Science and Technology RMUTT Journal, vol. 6, no.1, pp. 181-198, 2016.
L. S. Sha, “The Research of the Lane Detection Algorithm Base on Vision Sensor,” Research Journal of Applied Sciences, Engineering and Technology, vol. 6, no.4, pp. 642-646, 2013.
K. H. Lim, L. M. Ang, K. P. Seng, and S. W. Chin, “Lane Vehicle Detection and Tracking,” International Muti Conference of Engineers and Computer Scientists, Hong Kong, Mar. 18 – 20, 2009.
Downloads
Published
How to Cite
Issue
Section
License

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.